欧拉角的定义
在写这篇博客之前,我搜索了网上很多关于欧拉角的定义,发现大部分引用自维基百科的定义,我这里也引述一下:
维基百科定义
莱昂哈德·欧拉用欧拉角来描述刚体在三维欧几里得空间的取向。对于任何参考系,一个刚体的取向,是依照顺序,从这参考系,做三个欧拉角的旋转而设定的。所以,刚体的取向可以用三个基本旋转矩阵来决定。换句话说,任何关于刚体旋转的旋转矩阵是由三个基本旋转矩阵复合而成的。
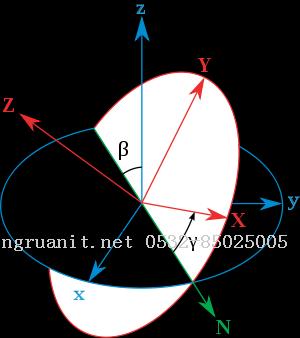
对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。参考系又称为实验室参考系,是静止不动的。而坐标系则固定于刚体,随着刚体的旋转而旋转。参阅下图。设定xyz-轴为参考系的参考轴。三个欧拉角: (αβγ),蓝色的轴是xyz-轴,红色的轴是XYZ-坐标轴。称xy-平面与XY-平面的相交为交点线(绿色),用英文字母(N)代表。
zxz顺规的欧拉角可以静态地这样定义:
α是x-轴与交点线的夹角,
β是z-轴与Z-轴的夹角,
γ是交点线与X-轴的夹角。
很可惜地,对于夹角的顺序和标记,夹角的两个轴的指定,并没有任何常规。科学家对此从未达成共识。每当用到欧拉角时,我们必须明确的表示出夹角的顺序,指定其参考轴。
实际上,有许多方法可以设定两个坐标系的相对取向。欧拉角方法只是其中的一种。此外,不同的作者会用不同组合的欧拉角来描述,或用不同的名字表示同样的欧拉角。因此,使用欧拉角前,必须先做好明确的定义。
顺规
在经典力学里,时常用zxz顺规来设定欧拉角;照着第二个转动轴的轴名,简称为x顺规。另外,还有别种欧拉角组。合法的欧拉角组中,唯一的限制是,任何两个连续的旋转,必须绕着不同的转动轴旋转。因此,一共有12种顺规。例如,y顺规,第二个转动轴是y-轴,时常用在量子力学、核子物理学、粒子物理学。另外,还有一种顺规,xyz顺规,是用在航空航天工程学;参阅泰特-布莱恩角。
延伸阅读
- ssh框架 2016-09-30
- 阿里移动安全 [无线安全]玩转无线电——不安全的蓝牙锁 2017-07-26
- 消息队列NetMQ 原理分析4-Socket、Session、Option和Pipe 2024-03-26
- Selective Search for Object Recognition 论文笔记【图片目标分割】 2017-07-26
- 词向量-LRWE模型-更好地识别反义词同义词 2017-07-26
- 从栈不平衡问题 理解 calling convention 2017-07-26
- php imagemagick 处理 图片剪切、压缩、合并、插入文本、背景色透明 2017-07-26
- Swift实现JSON转Model - HandyJSON使用讲解 2017-07-26
- 阿里移动安全 Android端恶意锁屏勒索应用分析 2017-07-26
- 集合结合数据结构来看看(二) 2017-07-26
 学习是年轻人改变自己的最好方式
学习是年轻人改变自己的最好方式