边缘检测的一般步骤:
滤波——消除噪声
增强——使边界轮廓更加明显
检测——选出边缘点
Canny算法
Canny边缘检测算法被很多人推崇为当今最优秀的边缘检测算法,所以我们第一个就介绍他。
opencv中提供了Canny函数。
#include<opencv2\opencv.hpp> #include<opencv2\highgui\highgui.hpp>using namespace std;using namespace cv;//边缘检测int main(){
Mat img = imread("lol3.jpg");
imshow("原始图", img);
Mat DstPic, edge, grayImage; //创建与src同类型和同大小的矩阵
DstPic.create(img.size(), img.type()); //将原始图转化为灰度图
cvtColor(img, grayImage, COLOR_BGR2GRAY); //先使用3*3内核来降噪
blur(grayImage, edge, Size(3, 3)); //运行canny算子
Canny(edge, edge, 3, 9, 3);
imshow("边缘提取效果", edge);
waitKey(0);
}看了canny算法提取的轮廓图,感觉真是厉害,居然把那么细致的额轮廓都提取出来了!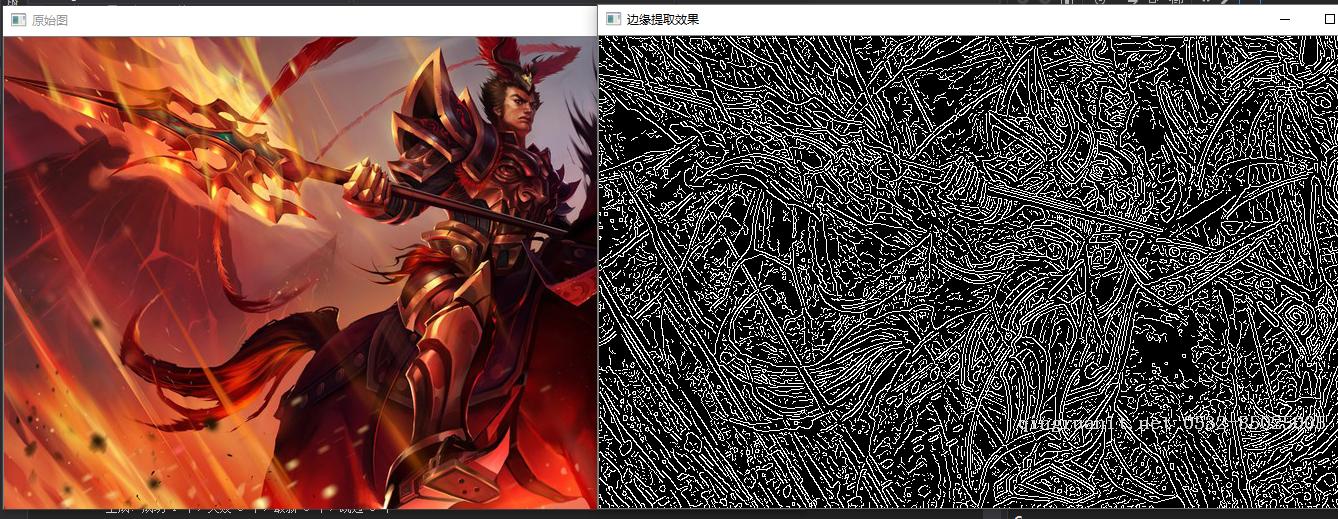
Sobel算法
#include<opencv2\opencv.hpp> #include<opencv2\highgui\highgui.hpp>using namespace std;using namespace cv;//边缘检测int main(){
Mat img = imread("lol3.jpg");
imshow("原始图", img);
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y, dst; //求x方向梯度
Sobel(img, grad_x, CV_16S, 1, 0, 3, 1, 1,BORDER_DEFAU
延伸阅读
- ssh框架
2016-09-30
- 阿里移动安全 [无线安全]玩转无线电——不安全的蓝牙锁
2017-07-26
- 消息队列NetMQ 原理分析4-Socket、Session、Option和Pipe
2024-03-26
- Selective Search for Object Recognition 论文笔记【图片目标分割】
2017-07-26
- 词向量-LRWE模型-更好地识别反义词同义词
2017-07-26
- 从栈不平衡问题 理解 calling convention
2017-07-26
- php imagemagick 处理 图片剪切、压缩、合并、插入文本、背景色透明
2017-07-26
- Swift实现JSON转Model - HandyJSON使用讲解
2017-07-26
- 阿里移动安全 Android端恶意锁屏勒索应用分析
2017-07-26
- 集合结合数据结构来看看(二)
2017-07-26
 学习是年轻人改变自己的最好方式
学习是年轻人改变自己的最好方式